블루투스를 통해 로봇을 제어
advertisement
| 이름 | BlueStick Control |
|---|---|
| 버전 | 2.3 |
| 업데이트 | 2015년 08월 31일 |
| 크기 | 899 KB |
| 카테고리 | 도구 |
| 설치 수 | 10K+ |
| 개발자 | INEX |
| Android OS | Android 2.1+ |
| Google Play ID | com.inex.BlueStickControl |
BlueStick Control · 스크린샷


BlueStick Control · 설명
블루투스를 통해 로봇을 제어
직렬 포트 프로필 (SPP) 블루투스 모듈 - 로보 - 원 3S 나 BlueStick을 지원하는 로봇과 함께 사용하기 * 진정해. 에서 제품을 확인
BlueStick - http://goo.gl/gKdSG
로보 - CIRCLE의 3S - http://goo.gl/Sj6aJ
로보 - 창조주 - http://goo.gl/b7jfs
POP-봇 XT 표준 - http://goo.gl/aLMu7
I-박스 III의 LogoBlocks이 응용 프로그램과 함께 사용하기에 로보 - CIRCLE3S이 코드를 다운로드
http://goo.gl/s0GeB
아두 이노이 응용 프로그램과 함께 사용하기에 POP-XT를 들어이 코드를 다운로드
http://goo.gl/6KcNX
에서이 응용 프로그램의 소스 코드를 다운로드
http://goo.gl/2qr7V
Bluestick 제어는 당신이 로보 - 서클을 제어하고 원하는대로 로봇에 적용 할 수 있습니다 robot.We 사용을 제어 할 수 Android 기기를 사용할 수 있습니다 블루투스 connection.So를 통해 로봇을 제어하는 데 도움이 될 것입니다.
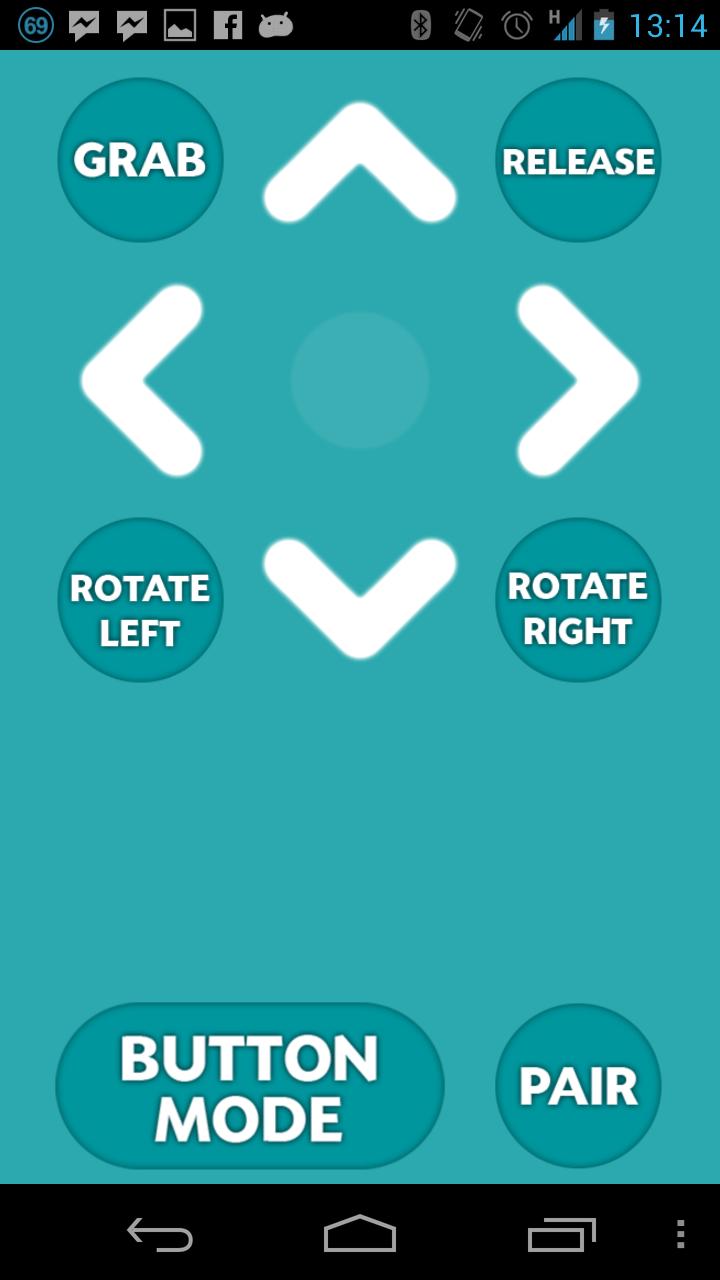
이 응용 프로그램의 사용, 사용자는 사용자가 "버튼 모드"에서 기울기 모드, 단지 터치를 사용하려면 다음 버튼 모드에서 apllication에 보도 방향 버튼으로 로봇을 제어하는 블루투스를 통해 로봇에 Android 기기를 연결해야합니다. 응용 프로그램이됩니다 타일 모드로 변경하고 텍스트 "모드를 기울"로 변경됩니다. 기울기 모드 사용자에 로봇을 제어 할 장치를 기울일 수 있습니다.
사용 방법
• 로봇이 응용 프로그램에 켜
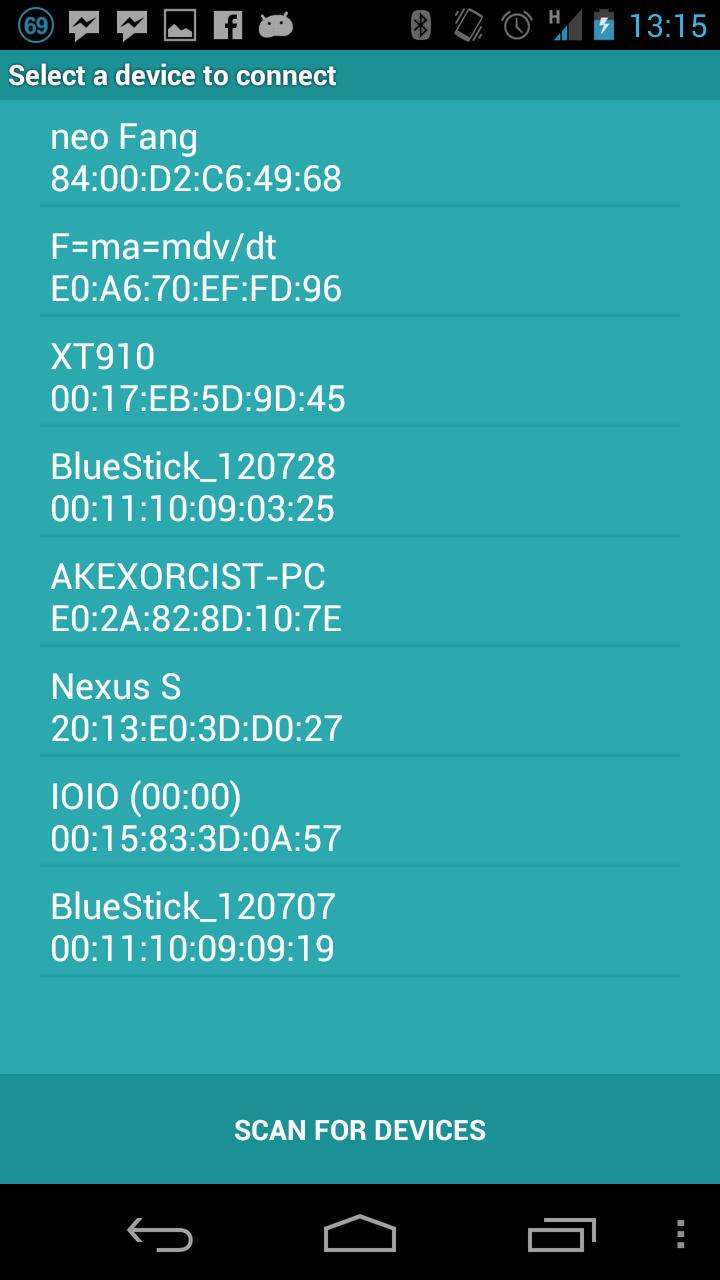
• "쌍"을 눌러 스캔 블루투스 로봇에하고 선택
• 연결을 기다리는 중
• 이제 로봇을 제어 할 수 있습니다
당신은 명령 단추를 변경하려는 경우
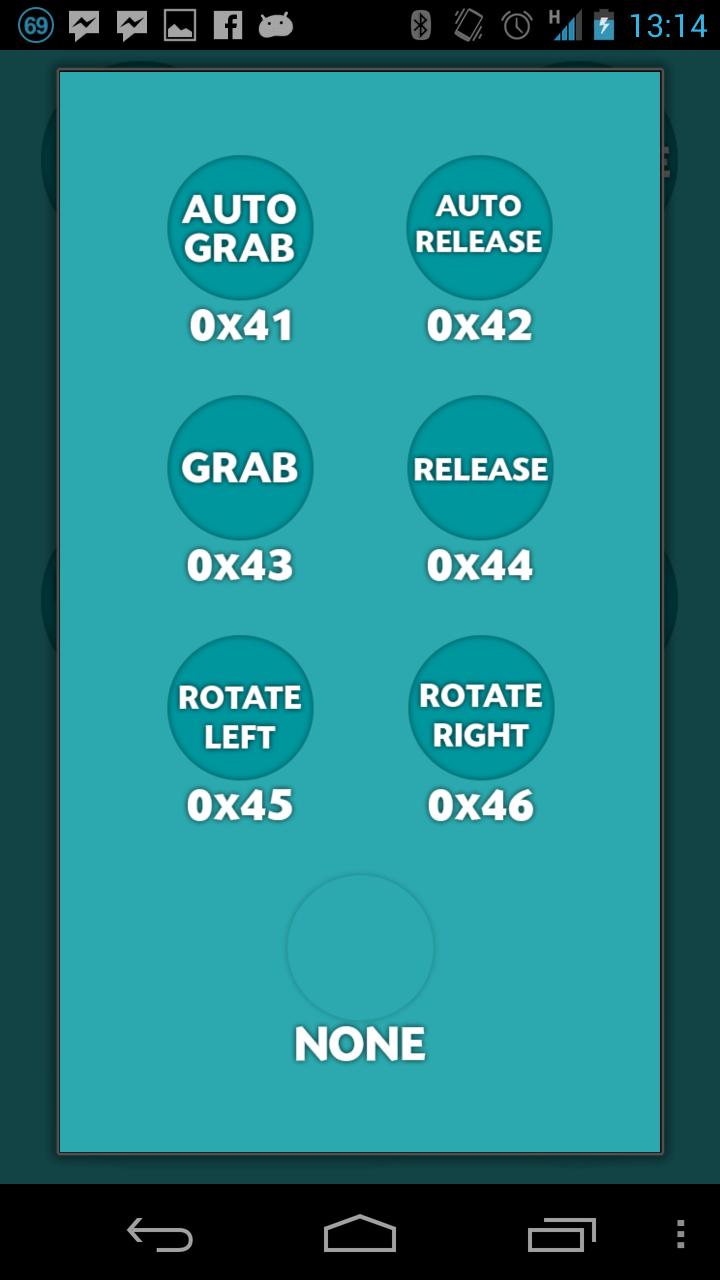
장치에 • 보도 메뉴 버튼을 누른 다음 명령 단추가 확대됩니다
• 변경하려는 버튼을 선택
당신이 원하는 • 선택 명령 단추
다시 또는 뒤로 • 보도 메뉴 버튼은 버튼 명령 단추 설정을 완료 할 수
. 직렬 포트 프로필에서이 응용 프로그램을 사용 블루투스 연결 (SPP)은 다음과 같이 로봇 16 진수 코드를 보내기 :
0x30 = 정지
0x38 = 최대
0x32 = 아래로
0x34 = 왼쪽
0x36 = 오른쪽
0x41 = 자동 뺏기
0x42은 = 자동 출시
0x43 = 잡아
0x44 = 출시
0x45 = 회전은 왼쪽
0x46은 = 회전 오른쪽
귀하의 로봇은 블루투스 연결을 가지고 있고, 블루투스 연결 코드가됩니다.
직렬 포트 프로필 (SPP) 블루투스 모듈 - 로보 - 원 3S 나 BlueStick을 지원하는 로봇과 함께 사용하기 * 진정해. 에서 제품을 확인
BlueStick - http://goo.gl/gKdSG
로보 - CIRCLE의 3S - http://goo.gl/Sj6aJ
로보 - 창조주 - http://goo.gl/b7jfs
POP-봇 XT 표준 - http://goo.gl/aLMu7
I-박스 III의 LogoBlocks이 응용 프로그램과 함께 사용하기에 로보 - CIRCLE3S이 코드를 다운로드
http://goo.gl/s0GeB
아두 이노이 응용 프로그램과 함께 사용하기에 POP-XT를 들어이 코드를 다운로드
http://goo.gl/6KcNX
에서이 응용 프로그램의 소스 코드를 다운로드
http://goo.gl/2qr7V
Bluestick 제어는 당신이 로보 - 서클을 제어하고 원하는대로 로봇에 적용 할 수 있습니다 robot.We 사용을 제어 할 수 Android 기기를 사용할 수 있습니다 블루투스 connection.So를 통해 로봇을 제어하는 데 도움이 될 것입니다.
이 응용 프로그램의 사용, 사용자는 사용자가 "버튼 모드"에서 기울기 모드, 단지 터치를 사용하려면 다음 버튼 모드에서 apllication에 보도 방향 버튼으로 로봇을 제어하는 블루투스를 통해 로봇에 Android 기기를 연결해야합니다. 응용 프로그램이됩니다 타일 모드로 변경하고 텍스트 "모드를 기울"로 변경됩니다. 기울기 모드 사용자에 로봇을 제어 할 장치를 기울일 수 있습니다.
사용 방법
• 로봇이 응용 프로그램에 켜
• "쌍"을 눌러 스캔 블루투스 로봇에하고 선택
• 연결을 기다리는 중
• 이제 로봇을 제어 할 수 있습니다
당신은 명령 단추를 변경하려는 경우
장치에 • 보도 메뉴 버튼을 누른 다음 명령 단추가 확대됩니다
• 변경하려는 버튼을 선택
당신이 원하는 • 선택 명령 단추
다시 또는 뒤로 • 보도 메뉴 버튼은 버튼 명령 단추 설정을 완료 할 수
. 직렬 포트 프로필에서이 응용 프로그램을 사용 블루투스 연결 (SPP)은 다음과 같이 로봇 16 진수 코드를 보내기 :
0x30 = 정지
0x38 = 최대
0x32 = 아래로
0x34 = 왼쪽
0x36 = 오른쪽
0x41 = 자동 뺏기
0x42은 = 자동 출시
0x43 = 잡아
0x44 = 출시
0x45 = 회전은 왼쪽
0x46은 = 회전 오른쪽
귀하의 로봇은 블루투스 연결을 가지고 있고, 블루투스 연결 코드가됩니다.