ब्लूटूथ के माध्यम से अपने रोबोट को नियंत्रित
advertisement
| नाम | BlueStick Control |
|---|---|
| संस्करण | 2.3 |
| अद्यतन | 31 अग॰ 2015 |
| आकार | 899 KB |
| श्रेणी | टूल |
| इंस्टॉल की संख्या | 10हज़ार+ |
| डेवलपर | INEX |
| Android OS | Android 2.1+ |
| Google Play ID | com.inex.BlueStickControl |
BlueStick Control · स्क्रीनशॉट


BlueStick Control · वर्णन
ब्लूटूथ के माध्यम से अपने रोबोट को नियंत्रित
सीरियल पोर्ट प्रोफाइल (एसपीपी) ब्लूटूथ मॉड्यूल - * आसान रोबो-चक्र 3S या BlueStick साथ समर्थन है, जो किसी भी रोबोट के साथ उपयोग करने के लिए। पर उत्पाद की जाँच
BlueStick - http://goo.gl/gKdSG
रोबो सर्किल 3S - http://goo.gl/Sj6aJ
रोबो-निर्माता - http://goo.gl/b7jfs
पॉप बीओटी एक्सटी स्टैंडर्ड - http://goo.gl/aLMu7
मैं बॉक्स तृतीय LogoBlocks इस आवेदन के साथ प्रयोग करने के लिए रोबो-CIRCLE3S इस कोड को डाउनलोड करने के लिए
http://goo.gl/s0GeB
Arduino के इस आवेदन के साथ उपयोग करने के लिए पॉप-XT के लिए इस कोड को डाउनलोड
http://goo.gl/6KcNX
से इस आवेदन के स्रोत कोड डाउनलोड
http://goo.gl/2qr7V
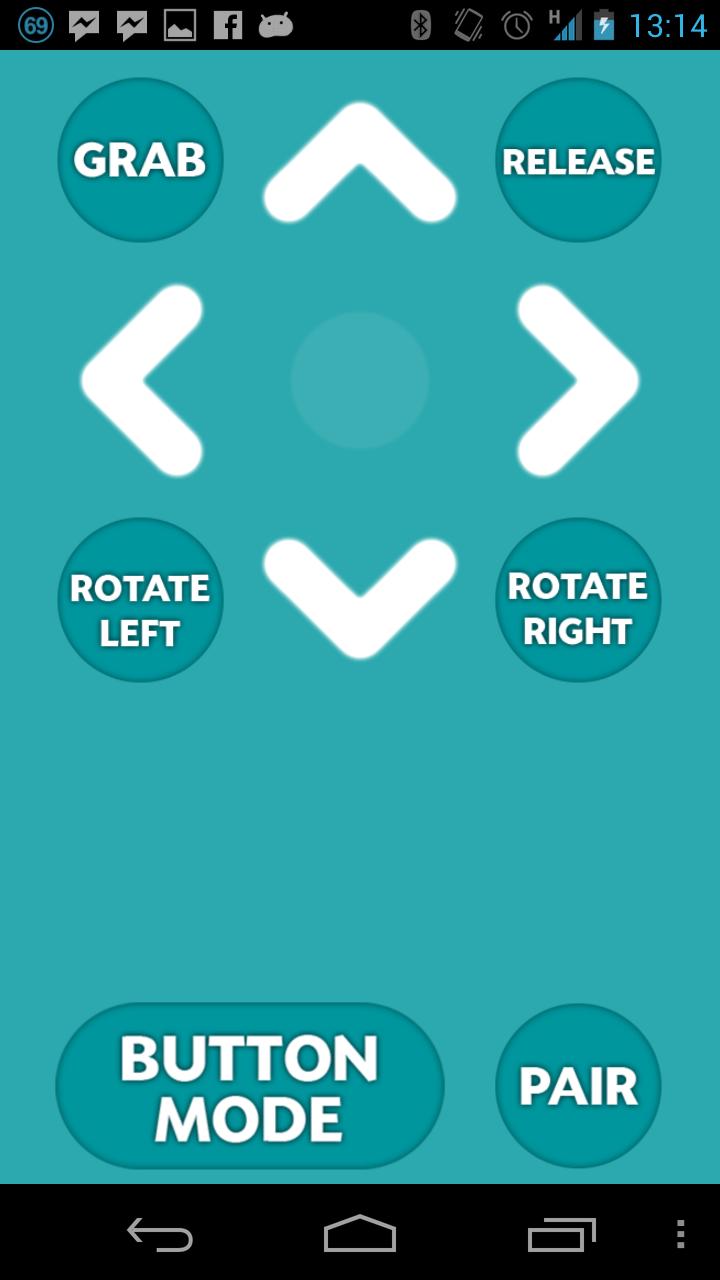
Bluestick नियंत्रण आप रोबो सर्किल नियंत्रित करने के लिए robot.We उपयोग को नियंत्रित करने के लिए एंड्रॉयड डिवाइस का उपयोग कर सकते हैं connection.So अपने ब्लूटूथ के माध्यम से अपने रोबोट को नियंत्रित करने में मदद मिलेगी और आप चाहते हैं के रूप में आप किसी भी रोबोट के लिए आवेदन कर सकते हैं।
आप झुकाव मोड का उपयोग करना चाहते हैं तो इस आवेदन के उपयोग में, उपयोगकर्ता तो बटन मोड में इस apllication में प्रेस दिशा बटन द्वारा अपने रोबोट को नियंत्रित करने के लिए ब्लूटूथ के माध्यम से रोबोट के लिए एंड्रॉयड डिवाइस जुड़ा होना चाहिए, सिर्फ व्याप्ति आवेदन "बटन मोड" पर छू जाएगा टाइल मोड को बदल सकते हैं और है कि पाठ "झुकाव मोड" में बदल जाएगा। झुकाव मोड में उपयोगकर्ता अपने रोबोट को नियंत्रित करने के लिए अपनी डिवाइस झुका सकते हैं।
कैसे इस्तेमाल करे
• अपने रोबोट और इस आवेदन को चालू करें
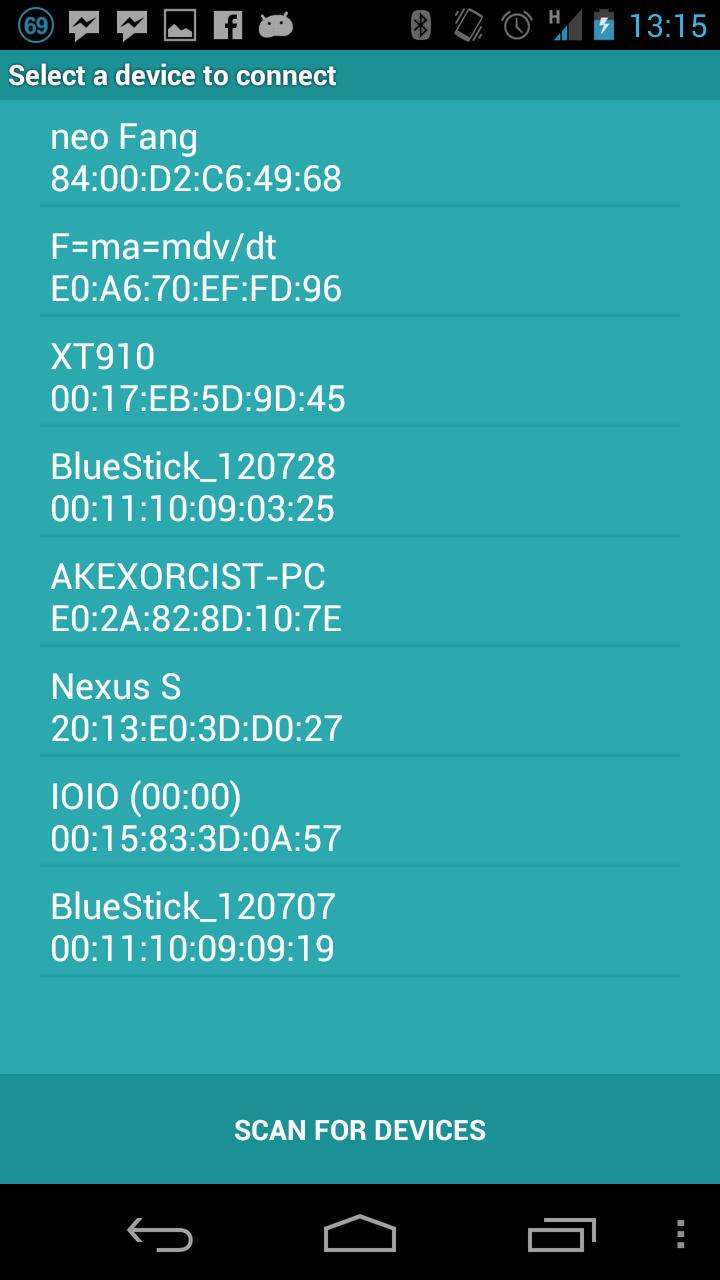
• प्रेस "जोड़ी" और अपने रोबोट और उसका चयन पर स्कैन ब्लूटूथ
• जुडने के लिए इंतजार
• अब आप अपने रोबोट को नियंत्रित कर सकते हैं
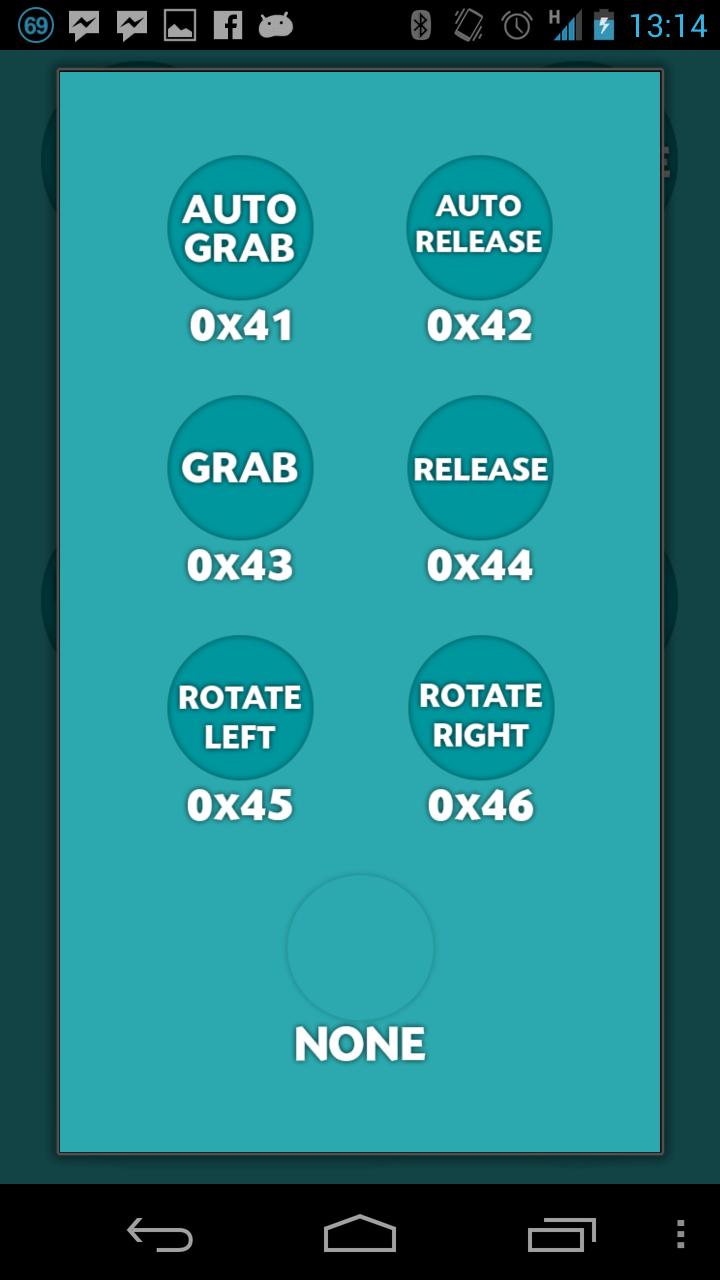
आप बदल आदेश बटन चाहते हैं
• अपने डिवाइस पर मेनू बटन दबाएँ फिर बटन बढ़ाना होगा आदेश
• आप बदलना चाहते हैं एक बटन का चयन करें
• चुनें आदेश बटन आप चाहते हैं
• प्रेस मेनू बटन को फिर या आदेश बटन सेटिंग को पूरा करने के लिए वापस बटन
रोबोट को इस सीरियल पोर्ट प्रोफाइल में आवेदन उपयोग ब्लूटूथ कनेक्शन (एसपीपी) .Send हेक्स कोड इस प्रकार है:
0x30 = रोकें
0x38 ऊपर =
0x32 = नीचे
0x34 = वाम
0x36 = अधिकार
0x41 = ऑटो पकड़ो
0x42 = ऑटो रिलीज
0x43 = पकड़ो
0x44 = रिलीज
0x45 = बाएं घुमाएं
0x46 = दाएं घुमाएं
आपका रोबोट ब्लूटूथ कनेक्शन है, और ब्लूटूथ कनेक्शन कोड के साथ प्रोग्राम होगा।
सीरियल पोर्ट प्रोफाइल (एसपीपी) ब्लूटूथ मॉड्यूल - * आसान रोबो-चक्र 3S या BlueStick साथ समर्थन है, जो किसी भी रोबोट के साथ उपयोग करने के लिए। पर उत्पाद की जाँच
BlueStick - http://goo.gl/gKdSG
रोबो सर्किल 3S - http://goo.gl/Sj6aJ
रोबो-निर्माता - http://goo.gl/b7jfs
पॉप बीओटी एक्सटी स्टैंडर्ड - http://goo.gl/aLMu7
मैं बॉक्स तृतीय LogoBlocks इस आवेदन के साथ प्रयोग करने के लिए रोबो-CIRCLE3S इस कोड को डाउनलोड करने के लिए
http://goo.gl/s0GeB
Arduino के इस आवेदन के साथ उपयोग करने के लिए पॉप-XT के लिए इस कोड को डाउनलोड
http://goo.gl/6KcNX
से इस आवेदन के स्रोत कोड डाउनलोड
http://goo.gl/2qr7V
Bluestick नियंत्रण आप रोबो सर्किल नियंत्रित करने के लिए robot.We उपयोग को नियंत्रित करने के लिए एंड्रॉयड डिवाइस का उपयोग कर सकते हैं connection.So अपने ब्लूटूथ के माध्यम से अपने रोबोट को नियंत्रित करने में मदद मिलेगी और आप चाहते हैं के रूप में आप किसी भी रोबोट के लिए आवेदन कर सकते हैं।
आप झुकाव मोड का उपयोग करना चाहते हैं तो इस आवेदन के उपयोग में, उपयोगकर्ता तो बटन मोड में इस apllication में प्रेस दिशा बटन द्वारा अपने रोबोट को नियंत्रित करने के लिए ब्लूटूथ के माध्यम से रोबोट के लिए एंड्रॉयड डिवाइस जुड़ा होना चाहिए, सिर्फ व्याप्ति आवेदन "बटन मोड" पर छू जाएगा टाइल मोड को बदल सकते हैं और है कि पाठ "झुकाव मोड" में बदल जाएगा। झुकाव मोड में उपयोगकर्ता अपने रोबोट को नियंत्रित करने के लिए अपनी डिवाइस झुका सकते हैं।
कैसे इस्तेमाल करे
• अपने रोबोट और इस आवेदन को चालू करें
• प्रेस "जोड़ी" और अपने रोबोट और उसका चयन पर स्कैन ब्लूटूथ
• जुडने के लिए इंतजार
• अब आप अपने रोबोट को नियंत्रित कर सकते हैं
आप बदल आदेश बटन चाहते हैं
• अपने डिवाइस पर मेनू बटन दबाएँ फिर बटन बढ़ाना होगा आदेश
• आप बदलना चाहते हैं एक बटन का चयन करें
• चुनें आदेश बटन आप चाहते हैं
• प्रेस मेनू बटन को फिर या आदेश बटन सेटिंग को पूरा करने के लिए वापस बटन
रोबोट को इस सीरियल पोर्ट प्रोफाइल में आवेदन उपयोग ब्लूटूथ कनेक्शन (एसपीपी) .Send हेक्स कोड इस प्रकार है:
0x30 = रोकें
0x38 ऊपर =
0x32 = नीचे
0x34 = वाम
0x36 = अधिकार
0x41 = ऑटो पकड़ो
0x42 = ऑटो रिलीज
0x43 = पकड़ो
0x44 = रिलीज
0x45 = बाएं घुमाएं
0x46 = दाएं घुमाएं
आपका रोबोट ब्लूटूथ कनेक्शन है, और ब्लूटूथ कनेक्शन कोड के साथ प्रोग्राम होगा।